The Plan
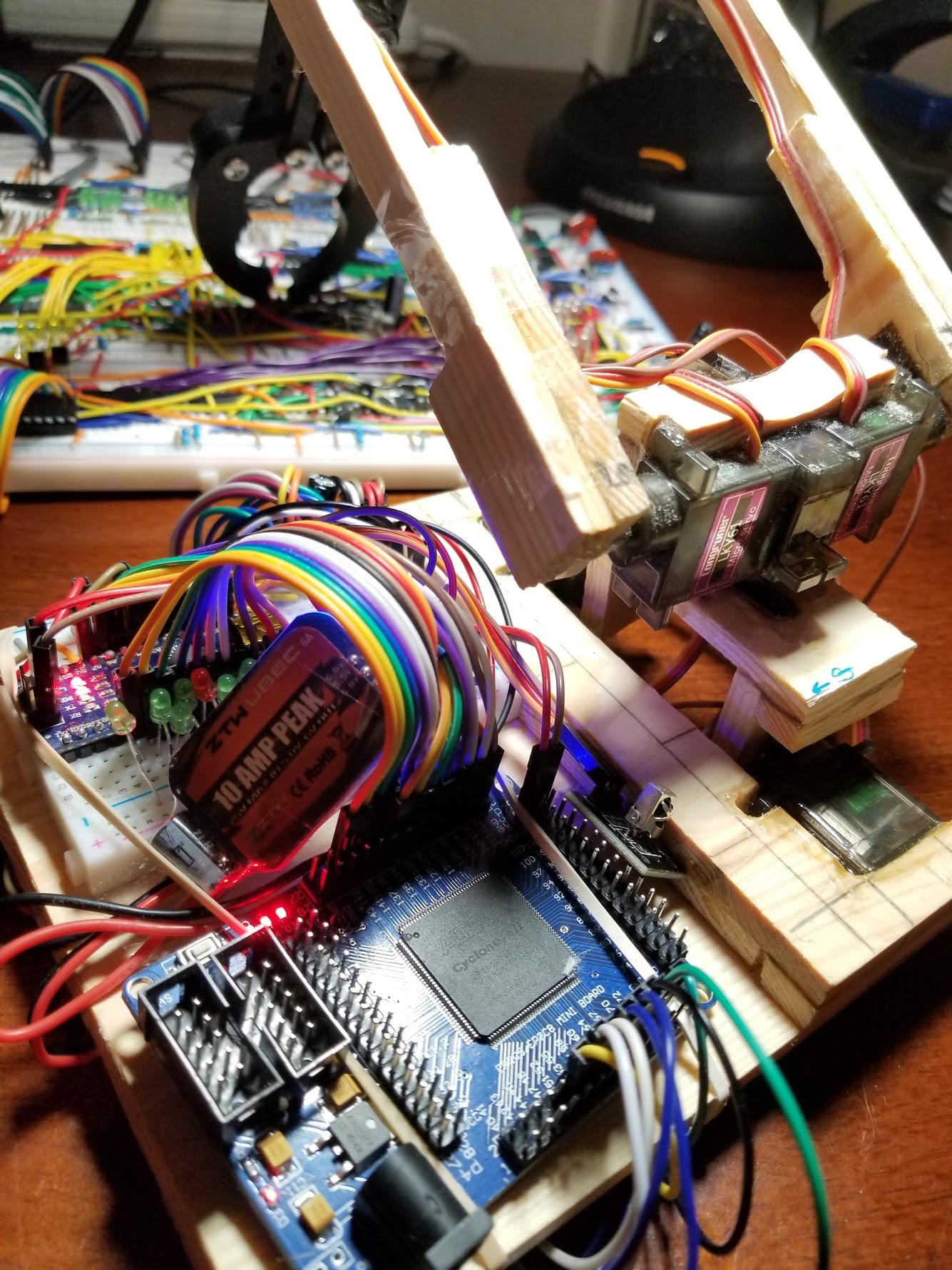
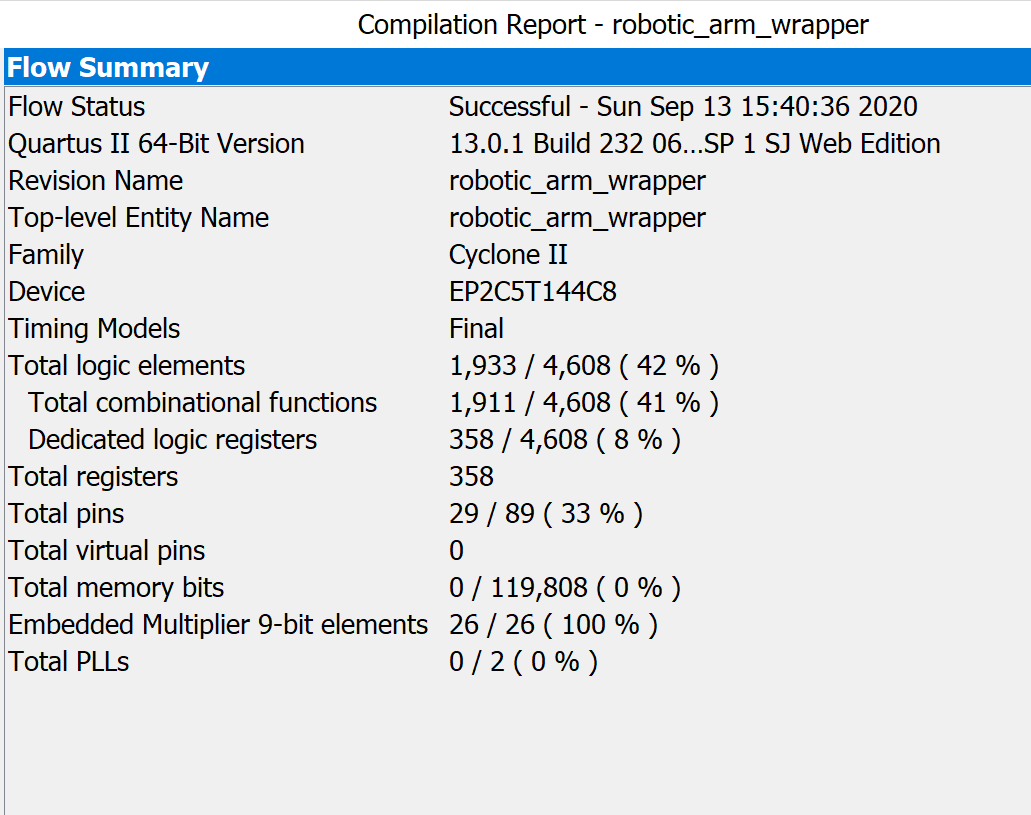
During the construction of my ALU, I learned about the FPGA, which my Digital Design class from the semester previous had failed to teach me about. My next project goal then became to build something powered by an FPGA in order to continue my practice of hardware design while avoiding the use of breadboards, which after doing many projects with the breadboard, I became temporarily disinterested in doing another.
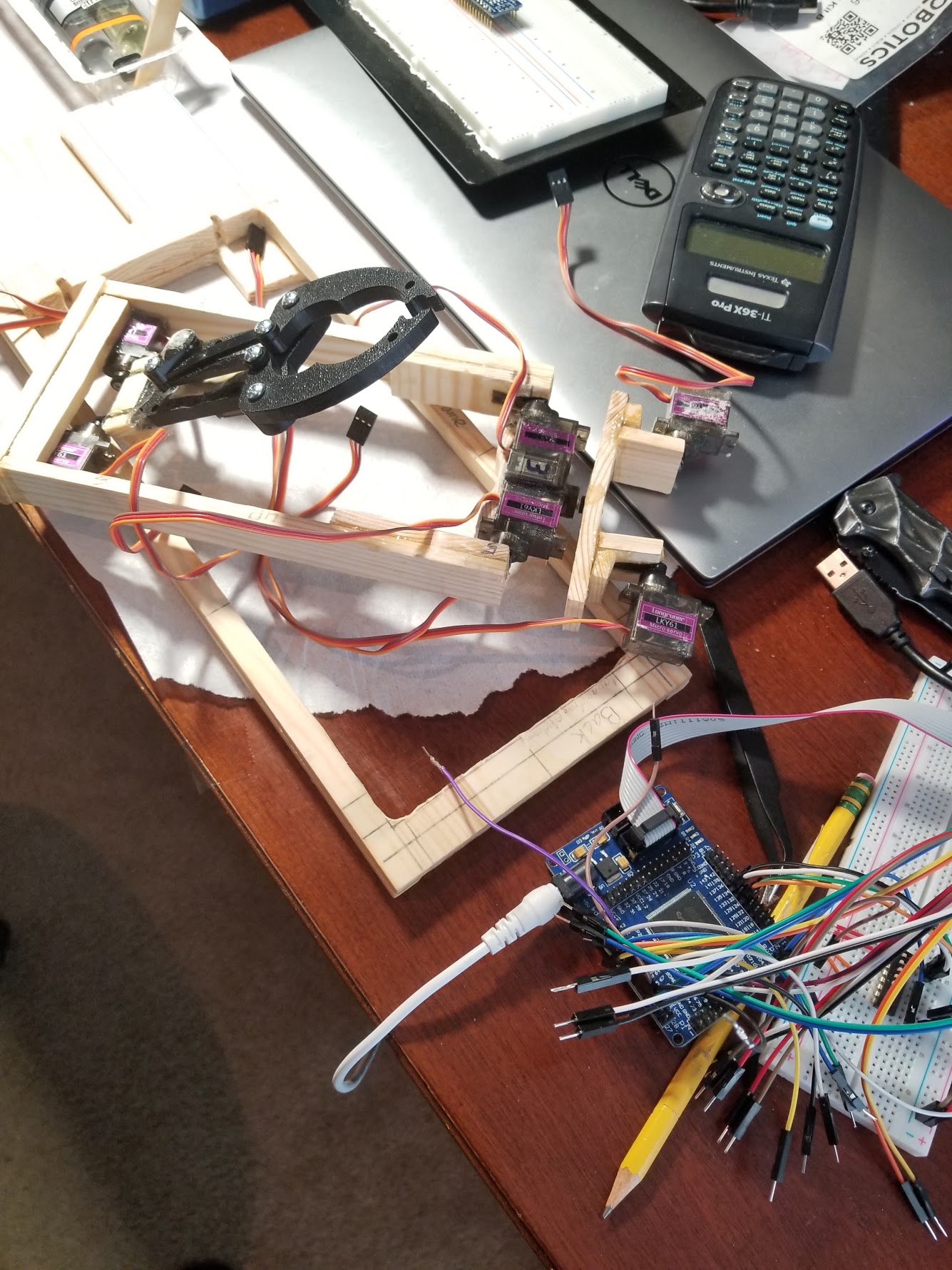
I figured robotic arms are cool (among the few other project ideas I was considering) and would serve as a perfect first project for my introduction to the world of FPGA’s.
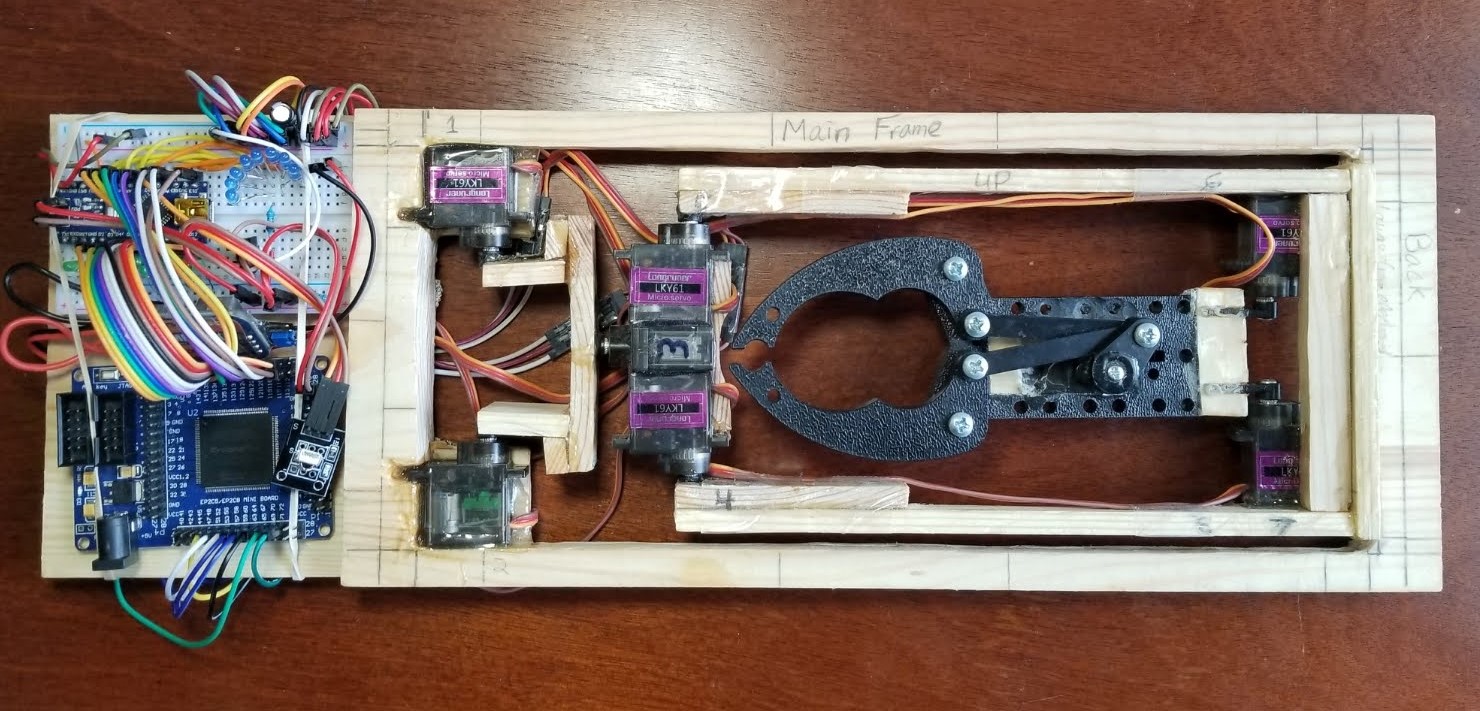
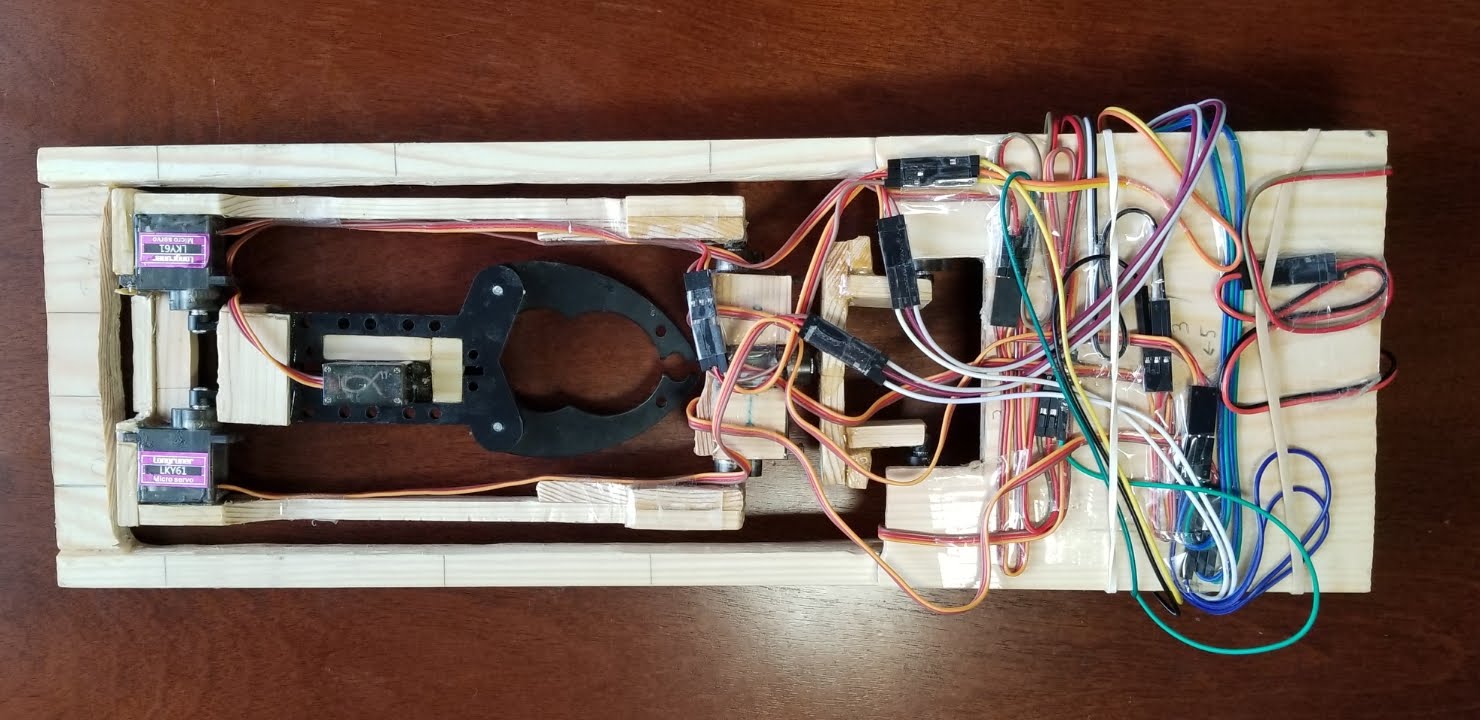
I decided I wanted a retractable arm design and an arm that could rise above or below its surface level so that it could easily be mounted to a car or something. I found no similar robotic arm on the internet, so I decided to pioneer and proceed with the design because it’s cool.